Licenca
To delo je na voljo pod pogoji slovenske licence Creative Commons 2.5:
priznanje avtorstva - nekomercialno - deljenje pod enakimi pogoji.
Celotna licenca je na voljo na spletu na naslovu http://creativecommons.org/licenses/by-nc-sa/2.5/si/. V skladu s to licenco je dovoljeno vsakemu uporabniku delo razmnoževati, distribuirati, javno priobčevati, dajati v najem in tudi predelovati, vendar samo v nekomercialne namene in ob pogoju, da navede avtorja oziroma avtorje in izdajatelja tega dela. Če uporabnik delo predela, kar pomeni, da ga spremeni, preoblikuje, prevede ali uporabi to delo v svojem delu, lahko predelavo dela ponudi na voljo le pod pogoji, ki so enaki pogojem iz te licence oziroma pod enako licenco.
![]()
Osnove globokega učenja
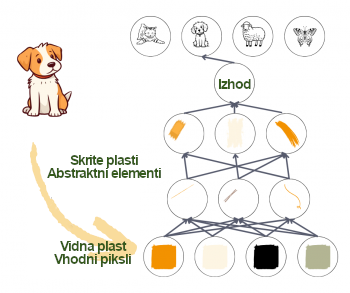
Ko ljudje gledamo sliko, na njej avtomatično prepoznamo predmete in obraze. Za algoritem pa slika ni nič drugega, kot le zbirka slikovnih točk oziroma pikslov. Med mešanico barv in različnimi stopnjami svetlosti ter prepoznavanjem obrazov je velikanski preskok, ki ga je preveč zapleteno izvesti.
Globoka nevrosnka mreža to doseže tako, da proces razdeli na zelo preproste reprezentacije v prvi plasti – na primer tako, da primerja svetlost dveh sosednjih pikslov in tako ugotovi prisotnost ali odsotnost robov na različnih predelih slike. Naslednja plast na podlagi robov išče bolj kompleksne entitete – na primer, vogale in obrobe, pri čemer zanemari majhna odstopanja pri položajih robov. Naslednja plast išče dele predmetov z uporabo obrob in vogalov. Postopoma se kompleksnost povečuje do točke, ko lahko zadnja plast združi različne dele dovolj dobro, da prepozna obraz ali identificira predmet.
Tega, kar je treba upoštevati v vsaki plasti, ne določajo programerji, temveč se tega sistem nauči iz podatkov v procesu učenja. S primerjanjem napovedi z dejanskimi rezultati v učnem sklopu podatkov se delovanje vsake plasti uravna na nekoliko drugačen način, kar obrodi vsakič nekoliko boljši rezultat.
Če je vse to izvedeno pravilno in pod pogojem, da je na voljo dovolj kakovostnih podatkov, bi se morala mreža razviti tako, da bo prezrla nepomembne dele slike, na primer natančno lokacijo entitet, kot in osvetlitev, ter se osredotočila na tiste dele, ki ji omogočajo prepoznavanje.
Tukaj je treba opozoriti na dejstvo, da je kljub naši uporabi robov in obrob za razumevanje procesa tisto, kar je dejansko predstavljeno v plasteh, niz številk, ki lahko ustrezajo stvarem, ki jih razumemo, ali pa tudi ne. Kar se pri tem ne spremeni, je vse večja abstraktnost in kompleksnost.
Učenje globoke nevronske mreže
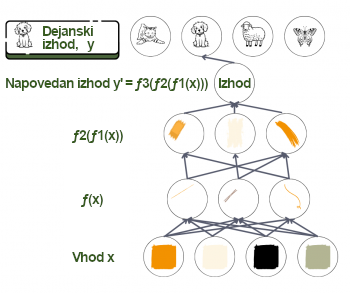
Vzemimo primer usmerjene nevronske mreže z nadzorovanim učenjem. Informacije tečejo naprej od ene plasti k naslednji, globlji plasti, brez povratnih zank. Kot pri vseh tehnikah strojnega učenja je tudi tukaj cilj ugotoviti, kako so vhodi povezani z izhodi – kateri parametri se združijo in kako se združijo, preden ustvarijo rezultat. Predpostavimo razmerje oziroma funkcijo $f$, ki povezuje vhod $x$ z izhodom $y$. Nato uporabimo mrežo, da poiščemo niz parametrov $θ$, ki dajejo najboljše ujemanje za napovedane in dejanske izhodne vrednosti.
Pri tem je napoved za $y$ končni rezultat, sklop podatkov $x$ pa je vhod. Pri prepoznavanju obraza je $x$ običajno sklop pikslov na sliki, $y$ je lahko ime osebe. V mreži plasti delujejo podobno kot delavci v proizvodni liniji, kjer se vsak delavec loti tistega, kar mu je bilo dodeljeno, potem pa to posreduje naprej naslednjemu delavcu. Prvi delavec vzame vhodno vrednost in jo malo preoblikuje, nato jo da drugemu v liniji. Drugi naredi isto, nato preda tretjemu in tako naprej, dokler se vhodna vrednost ne preoblikuje v končni rezultat.
Matematično je funkcija f razdeljena na več funkcij $f1$, $f2$, $f3$ ... pri čemer je $f = … f3(f2(f1(x)))$. Plast poleg vhoda preoblikuje parametre vhoda z uporabo $f1$, naslednja plast z uporabo $f2$ in tako naprej. Programer lahko pri tem posreduje, tako da pomaga izbrati pravilno družino funkcij na podlagi poznavanja problema.